ヒトを人たらしめるものは直立二足歩行
まず装具療法の説明を行う前に、運動学的知識を整理していきます。
人はなんで二足直立歩行を獲得したのでしょうか。
それは両手で物を使って獲物をとる、とった獲物を運ぶ、そして調理するためです。手を使うためにヒトは二足直立になりました。
その2足歩行を決定づけている要素は、
●全荷重を担う足底の機能
●股関節の動的支持機構
です。
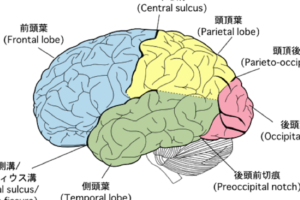
立位で足部から受けた刺激は股関節を通じて、骨盤を固定し、骨盤は体幹を受け止めます。
骨盤はほとんどの姿勢で運動の要として存在し、その安定性は股関節の動的な支持機構に由来しています。

立位に必要な股関節の安定性
股関節の安定性に寄与する筋は大腰筋で、大腰筋は赤筋繊維が50%を占める抗重力筋です。
股関節を伸展すると
大腿骨頭は臼蓋から前方に大きくはみ出してきます、突出した大腿骨頭は伸長された大腰筋腱を圧迫し、大腰筋の収縮を賦活することになります。
非荷重位には股関節屈曲を容易にするシステムですが、足底荷重位では体幹が後方に倒れないようにする、automaticな抗重力姿勢保持システムとして機能します。
骨盤は直立のためのデザイン
骨盤は大腿骨と脊柱を結ぶものであり、直立二足歩行動物であるヒトでは直立の為のデザインとなっています。
立位では骨盤はほぼ垂直位であり、その上に自然に乗っているため、体幹の伸展保持は困難なことではありません。
立位の姿勢保持の可否は膝折れするかどうかであり、折れるようなら装具で制御すればよいということになります。
しかし座位では大腿骨が床に平行になっているとすれば、安楽座位では骨盤は後方に40~50°倒れ、体幹を丸く屈曲させ座位姿勢を保持しています。
脊柱はその骨盤の上に乗っており、座位で後方に倒れないようにするには、大腰筋の随意的な持続的活動が不可欠であり、皮質脊髄路の障害を主とする脳卒中早期の患者には困難な課題となります。
"
長下肢装具療法に必要な神経学の知識
神経学的な知識を整理すると、脳卒中片麻痺では随意運動制御が破綻し、運動麻痺が生じます。
脳卒中片麻痺は外側皮質脊髄路の障害が主であり、前庭脊髄路や網様体脊髄路は障害を受けにくいことが多いため、
頭部の動きや荷重刺激など外部環境による刺激を与えることで随意的な運動が困難な場合でも、立位や自動的な歩行を賦活することが出来ます。

脳卒中リハビリ早期では立位や歩行を優先した方がいい
以上のことから、脳卒中早期では、下肢の支持性が低く、座位も立位も困難な場合が多く、
実際の臨床場面でも、重度患者に対して、座位保持の練習を選択する場合が多く見られます。
しかし、前述した股関節・骨盤の構造や神経学的なシステムを考慮すると、
アライメントを重視した立位・歩行訓練を優先することが合理的であり、
積極的な抗重力活動の賦活やその量を確保することが廃用症候群の予防にもつながることになります。
そのため長下肢装具を使用することで早期からの立位訓練を行うことができるのです。

治療用装具のねらい
治療用装具のねらいとしては、立位・座位・歩行にとって、股関節周囲筋の働きが重要であり、
その股関節が最大限のパフォーマンスを発揮出来るように、足関節の動きを引き出だし、
ダイナミックアライメントを伴った股関節の運動学習を行うことにあります。
"

随意運動と歩行
では続いて、随意運動障害と歩行についての説明させて頂きます。
まず歩行の神経学的特性に関して、歩行には2つの性質があります。
1つ目が随意性
2つ目が自動性
です。
随意的な歩行歩行の開始・終了・障害物の回避などの目的思考的な面を持ち、基盤となる神経機構は大脳皮質
自動的な歩行リズミカルかつ定常的なパターン運動であり、基盤となる神経機構は皮質下に存在します。
自動的な歩行、自動性歩行にはリズミカルな四肢の運動、頭頸部・体幹上下肢のアライメントや筋緊張の制御が必須であり、
歩行リズム生成系と筋緊張制御系の2つの協調的作用によって実現されています。
筋緊張制御とリズム生成
その基本的な神経機構は脳幹と脊髄に存在し、小脳や基底核によりコントロールされています。
脊髄には歩行のリズムパターンを生成するcentral pattern generator(CPG)が存在します。
CPGは脊髄反射を誘発するニューロン群により構成されるため、歩行を生成する根本的な仕組みは脊髄反射の仕組みに準じます。
次に自動性歩行が生じるメカニズムについて説明します。
ます身体重心が前方へ移動すると、身体が倒れないように一方の下肢が体重を支え、残りの一方が遊脚に移ることで開始し、その後はCPGによって制御されます。
立脚下肢の伸展活動と遊脚下肢の屈曲運動が交互に切り替わることで自動歩行が生じます。
CPGは速度・荷重量・下肢の位置を調整し、律動的な下肢の交互運動を行うことで、上位中枢からの指令だけでなく、末梢からの入力によっても活動が起こるとされています。
下肢の律動的な交互運動によりCPGが賦活されると定義されていますが、それには股関節の動作とそれに伴う感覚情報が大きく影響するとされています。
CPG内にEHC・FHCという二つの介在ニューロン群が存在しており、相互に抑制性結合をもつことで屈曲伸展の交互運動を生み出すことを可能にしてます。
まとめ
脳卒中早期では、下肢の支持性が低く、座位も立位も困難な場合が多く、実際の臨床場面でも、重度患者に対して、座位保持の練習を選択する場合が多く見られます。
しかし、前述した股関節・骨盤の構造や神経学的なシステムを考慮すると、
アライメントを重視した立位・歩行訓練を優先することが合理的であり、
積極的な高重力活動の賦活やその量を確保することが廃用症候群の予防にもつながります。
参考図書・教科書